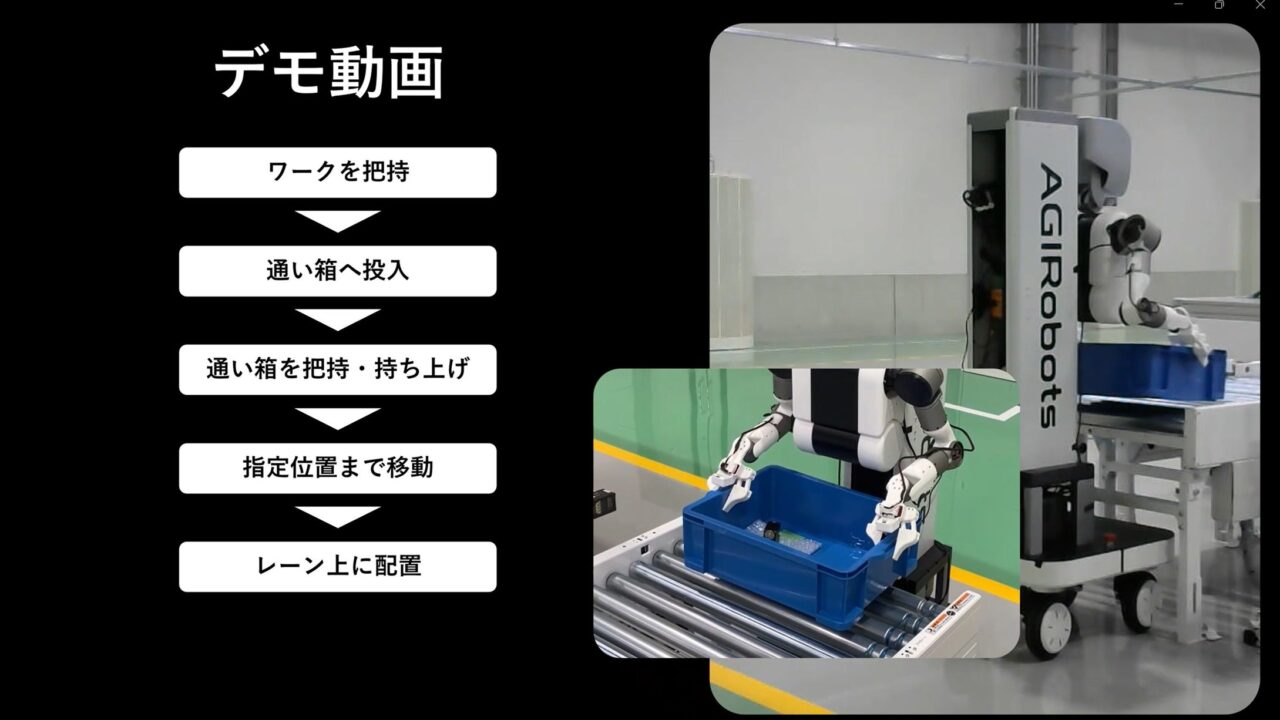
この記事の要点: AGIRobots株式会社は、開発を進めている移動型セミヒューマノイドロボット「AGIRobots Worker」を使用し、実際の工場環境におけるマテリアルハンドリングのデモンストレーションを実施しました。このデモでは、ワークのピッキングから通い箱への投入、箱の持ち上げ、移動、そして所定位置への配置までの一連の作業が行われ、既存の工場環境におけるロボットの活用可能性が検証されました。
発表内容のポイント
- 車輪移動と昇降式双腕を備えたセミヒューマノイドによる一連のマテハン動作を実証
- ワークのピッキング、通い箱の搬送、所定位置への配置までの一連の工程をカバー
- 既存の設備環境を大きく変更することなく、段階的に導入できるロボットを目指す
発表の背景
製造業や物流業では、深刻な人手不足や多品種少量生産への対応が急務となっています。こうした中、人と同じ環境で柔軟に作業できるロボットへの期待が高まる一方で、既存設備の大幅な改修を伴わないロボット導入には、移動能力や作業対象への接近、把持、搬送、現場適応性といった多くの課題が存在していました。
何が発表されたのか
今回デモを実施した「AGIRobots Worker」は、車輪移動機構と上下昇降機構付きの双腕ロボットを組み合わせた移動型セミヒューマノイドロボットです。デモでは、工場内マテハンを想定し、ワークをピッキングして通い箱へ投入した後に、その通い箱自体を持ち上げてレーンまで移動し、指定の場所に配置するまでの一連の作業を検証しました。人が作業することを前提に作られた既存の現場環境へ、スムーズに導入できるロボットの実現を目指しています。
製造業・生産管理への見方
生産現場における自動化やDXを推進する上で、既存ラインの大規模な改修コストや期間は大きな障壁となります。人型の上半身と移動型の下半身を組み合わせたセミヒューマノイドロボットは、人が作業している既存のスペースや設備をそのまま活かしながら、段階的に自動化領域を広げられる可能性を秘めています。特にピッキングから通い箱の搬送・配置といった、工程間をまたぐ軽作業の自動化は、現場の省人化と生産管理の効率化に直結するアプローチとして注目されます。
現場で確認したいポイント
- 実際の工場環境における移動速度や、ワーク・通い箱の可搬重量が自社の要件を満たすか
- 多品種少量生産の現場において、ワークの形状変更に対する把持・ピッキングの追従性があるか
- 既存の生産ラインや作業員が稼働するエリアでの安全性確保と、衝突回避の仕組みはどうなっているか
確認しておきたい点
今回の発表は実際の工場環境におけるデモンストレーションの実施報告であり、製品の具体的な販売時期、価格、詳細なスペック、および導入実績などの数値情報は現時点で明らかにされていません。
関連リンク
- AGIRobots株式会社 コーポレートサイト:企業の事業内容やロボット開発に関する情報
- AGIRobots 企業情報(日本語):AGIRobotsの日本語版公式サイト
- 発表企業のPR TIMESページ
出典情報
| 出典 | PR TIMES |
|---|---|
| 発表企業 | AGIRobots株式会社 |
| 発表日時 | 2026-06-30 23:56:36 |
| 元記事 | PR TIMESで読む |