この記事の要点: Tsubame Lab株式会社は、実験現場におけるロボットアームや周辺機器、測定機器の連携・制御を支援するソフトウェア「Tsubame Studio」をオープンソースとして無償公開しました。専門的なプログラミング知識がなくても、ブラウザ上の直感的な操作画面から実験プロセスの自動化に取り組むことが可能です。ロボット単体の制御にとどまらず、データ取得や解析までを見据えた自動化環境の構築を支援します。
発表内容のポイント
- ビジュアルプログラミングやPython実行により、専門知識なしで動作手順を構築可能
- UR、DENSO、DOBOT、UFACTORYなどの市販ロボットアームに対応
- グリッパや電動ピペットなどの周辺機器制御や、安全機構を標準搭載
発表の背景
研究開発や実験の現場では、再現性の向上や作業負荷の軽減に向けて自動化への関心が高まっています。しかし、実際の実験工程はロボット単体で完結せず、搬送、分注、測定、データ解析など複数の装置を連携させる必要があります。既存の制御ソフトは特定メーカーに依存するものが多く、異なる通信仕様の装置を統合するには高度な専門知識が必要となるため、導入や運用の高い障壁となっていました。
何が発表されたのか
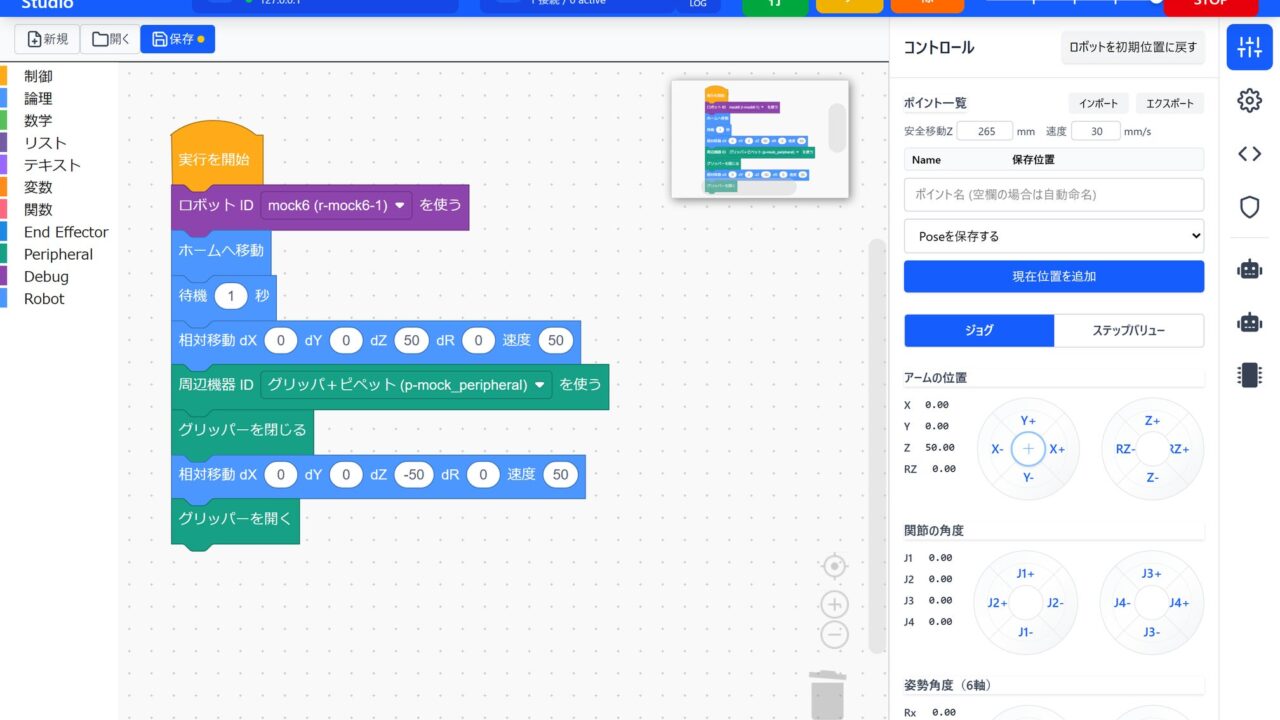
今回公開された「Tsubame Studio」は、中核となる制御機能を無償で提供します。Google Blocklyをベースにしたビジュアルプログラミングに対応し、ブロックを配置するだけで動作シーケンスを作成できます。作成したブロックはPythonコードへ自動変換されるため、スクリプトでの直接編集へと段階的に移行できます。さらに、実機がない状態でも動作を確認できるシミュレーションモードや、スマートフォンを傾けて直感的にロボットを動かすテレオペレーション機能も備えています。
製造業・生産管理への見方
製造業の試験・検査工程や化学・バイオ分野の生産準備段階において、実験やサンプルのハンドリング作業の自動化はDX推進の重要なテーマです。本ソフトウェアは、複数メーカーのロボットアーム(4軸・6軸)に対応し、グリッパの把持力調整や電動ピペットの制御など、細かなエンドエフェクタ操作をGUIから設定できます。オープンソース(GNU AGPL-3.0)として公開されたことで、現場主導での迅速な検証や、既存設備との連携テストが容易になります。
現場で確認したいポイント
- 自社で保有または導入予定のロボットアームが対応機種に含まれているか
- AGPL-3.0ライセンスの適用範囲が、自社のセキュリティや商用利用の規定に適合するか
- 動作環境として必要なWindowsのバージョンやPythonのバージョンは満たされているか
確認しておきたい点
動作環境の詳細(Windowsの具体的な動作確認済みOSやPythonのバージョン)は原文に記載がないため、導入前に確認が必要です。また、インストールを簡素化したデスクトップアプリ版(有償予定)は2026年8月にリリース予定とされています。
関連リンク
- 発表企業サイト:Tsubame Lab株式会社の公式サイトです。
- 発表企業のPR TIMESページ
出典情報
| 出典 | PR TIMES |
|---|---|
| 発表企業 | Tsubame Lab株式会社 |
| 発表日時 | 2026-06-30 19:00:01 |
| 元記事 | PR TIMESで読む |